Currently, the auto industry is
undergoing an evolution to vehicle autonomy. And with the emergence of
technology companies in this sector, innovation is happening at an
unprecedented rate. Currently, vehicles are equipped with partial autonomy
capabilities – specifically, they are able to maneuver on their own in highway
settings (in the presence of a human driver).
The next logical step will autonomous
driving in urban settings (again, in the presence of a human driver). However,
maneuvering in cities is a complex, and thus expensive, problem to solve.
Autonomous vehicles (AV) must take into account a plethora of new variables,
including traffic lights, vulnerable road users, and constant changes in speed
and traffic density. As a result, the industry has hit a barrier with highway
autonomy – there is simply nothing on the market today that can enable urban
vehicle autonomy.
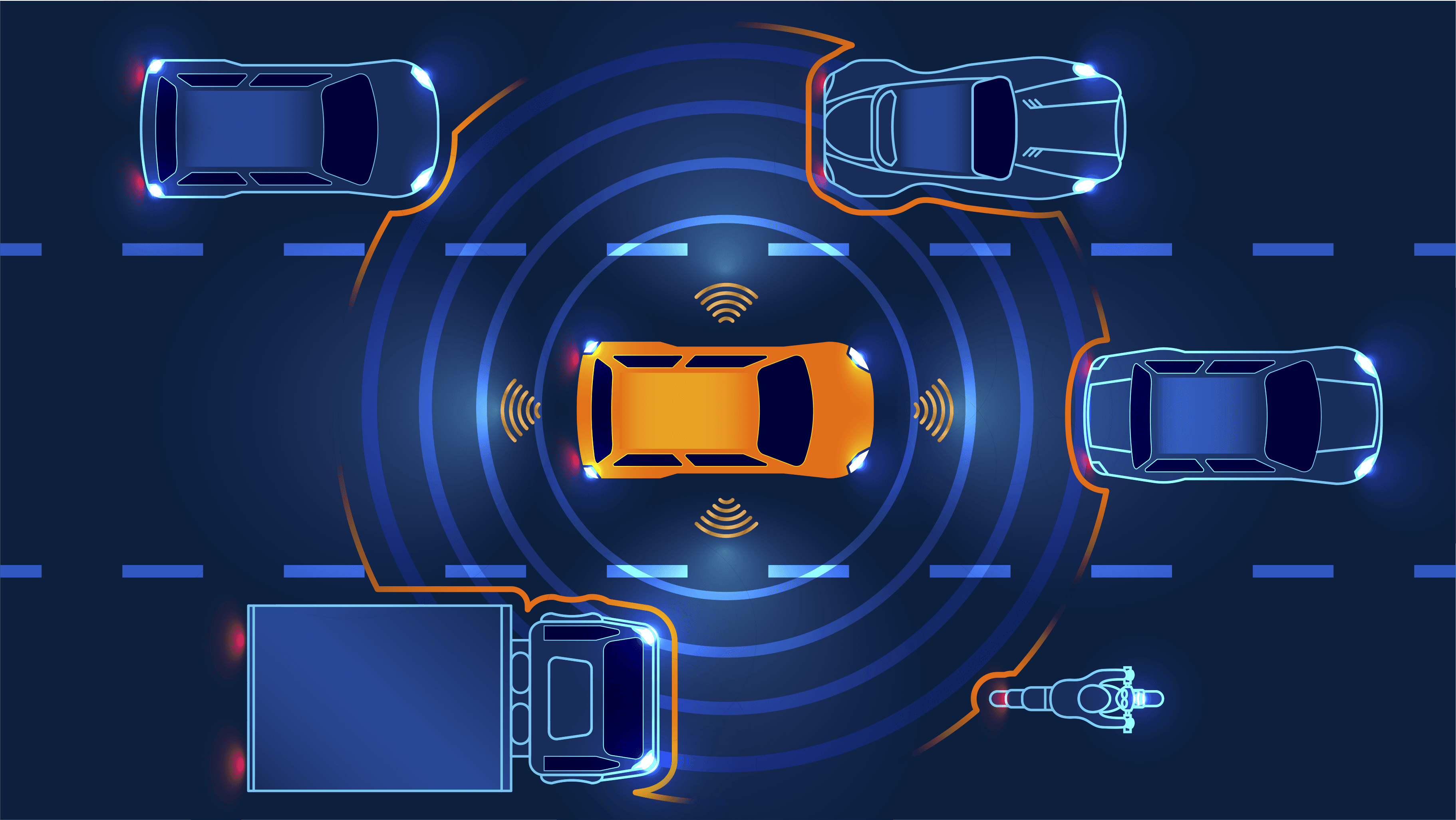
A major reason as to why the
industry is stuck at highway autonomy is due to the current unscalable sensor
configuration that is driving in cities. Presently, to capture image data, eight
monochromatic cameras are mounted on various places around the car. Given that
there needs to be two sources of depth information – along with a RADAR
adjacent to each image sensor, there must be a single LiDAR integrated onto the
car. The total cost all of this, mostly due to the costly LiDAR, is [around
$8000](https://www.forbes.com/sites/forbestechcouncil/2020/10/26/how-to-practically-enable-vehicle-autonomy-in-urban-settings/?sh=3b1396573234).
Alternatively, one can replace the
monochromatic cameras with stereoscopic image sensors, which also act as
sources of depth information. As a result, the costly LiDAR becomes obsolete –
it can be eliminated. With solely stereo cameras being used in conjunction with
the same RADAR configuration elaborated upon above, the total cost of the
system is much cheaper than the current, unscalable configuration. This newfound
scalability will allow car OEMs to make the smooth transition to urban autonomy
as the industry evolves, allowing them to be competitive in the long run.
Unfortunately, today, there is no
platform capable of processing stereoscopic image data. Solutions in cars today
are based on legacy technology originally developed for different use cases.
Because of their constraints, they are not purpose-built for the monumental
task of self-driving. A novel product must be integrated into vehicles to allow
them to process stereoscopic vision, therefore enabling advanced autonomous
capabilities in a scalable manner.
To process image data from
stereoscopic cameras, an AV must be equipped with a platform that generates a
minimum of 75 Tera-Operations-Per-Second (TOPS) per watt of power consumption. We
@ Recogni are developing a solution with such capabilities. Through leveraging
key innovations in ASIC architecture, AI, and mathematics, our product has
unmatched capabilities, at 100 TOPS per watt. As a result, we can enable
urban autonomy in a practical manner through our ability to support the
functioning of stereoscopic image sensors. OEMs should integrate our product into
their vehicles to adapt with the evolving market and enable urban autonomy.
By Sidhart Krishnamurthi, Product Management @ Recogni
To learn more about Recogni, check out www.recogni.com